Configurables available to BaseTalon. More...
#include <ctre/phoenix/motorcontrol/can/BaseTalon.h>
Public Member Functions | |
| BaseTalonConfiguration (FeedbackDevice defaultFeedbackDevice) | |
| std::string | toString () |
| std::string | toString (std::string prependString) |
 Public Member Functions inherited from ctre::phoenix::motorcontrol::can::BaseMotorControllerConfiguration Public Member Functions inherited from ctre::phoenix::motorcontrol::can::BaseMotorControllerConfiguration | |
| BaseMotorControllerConfiguration () | |
| std::string | toString () |
| std::string | toString (std::string prependString) |
| Public Member Functions inherited from ctre::phoenix::CustomParamConfiguration | |
| CustomParamConfiguration () | |
| std::string | toString () |
| std::string | toString (std::string prependString) |
Public Attributes | |
| BaseTalonPIDSetConfiguration | primaryPID |
| Primary PID configuration. More... | |
| BaseTalonPIDSetConfiguration | auxiliaryPID |
| Auxiliary PID configuration. More... | |
| LimitSwitchSource | forwardLimitSwitchSource |
| Forward Limit Switch Source. More... | |
| LimitSwitchSource | reverseLimitSwitchSource |
| Reverse Limit Switch Source. More... | |
| int | forwardLimitSwitchDeviceID |
| Forward limit switch device ID. More... | |
| int | reverseLimitSwitchDeviceID |
| Reverse limit switch device ID. More... | |
| LimitSwitchNormal | forwardLimitSwitchNormal |
| Forward limit switch normally open/closed. More... | |
| LimitSwitchNormal | reverseLimitSwitchNormal |
| Reverse limit switch normally open/closed. More... | |
| FeedbackDevice | sum0Term |
| Feedback Device for Sum 0 Term Note the FeedbackDevice enum holds all possible sensor types. More... | |
| FeedbackDevice | sum1Term |
| Feedback Device for Sum 1 Term Note the FeedbackDevice enum holds all possible sensor types. More... | |
| FeedbackDevice | diff0Term |
| Feedback Device for Diff 0 Term Note the FeedbackDevice enum holds all possible sensor types. More... | |
| FeedbackDevice | diff1Term |
| Feedback Device for Diff 1 Term Note the FeedbackDevice enum holds all possible sensor types. More... | |
| Public Attributes inherited from ctre::phoenix::motorcontrol::can::BaseMotorControllerConfiguration | |
| double | openloopRamp |
| Seconds to go from 0 to full in open loop. More... | |
| double | closedloopRamp |
| Seconds to go from 0 to full in closed loop. More... | |
| double | peakOutputForward |
| Peak output in forward direction [0,1]. More... | |
| double | peakOutputReverse |
| Peak output in reverse direction [-1,0]. More... | |
| double | nominalOutputForward |
| Nominal/Minimum output in forward direction [0,1]. More... | |
| double | nominalOutputReverse |
| Nominal/Minimum output in reverse direction [-1,0]. More... | |
| double | neutralDeadband |
| Neutral deadband [0.001, 0.25]. More... | |
| double | voltageCompSaturation |
| This is the max voltage to apply to the hbridge when voltage compensation is enabled. More... | |
| int | voltageMeasurementFilter |
| Number of samples in rolling average for voltage. More... | |
| ctre::phoenix::sensors::SensorVelocityMeasPeriod | velocityMeasurementPeriod |
| Desired period for velocity measurement. More... | |
| int | velocityMeasurementWindow |
| Desired window for velocity measurement. More... | |
| double | forwardSoftLimitThreshold |
| Threshold for soft limits in forward direction (in raw sensor units) More... | |
| double | reverseSoftLimitThreshold |
| Threshold for soft limits in reverse direction (in raw sensor units) More... | |
| bool | forwardSoftLimitEnable |
| Enable forward soft limit. More... | |
| bool | reverseSoftLimitEnable |
| Enable reverse soft limit. More... | |
| SlotConfiguration | slot0 |
| Configuration for slot 0. More... | |
| SlotConfiguration | slot1 |
| Configuration for slot 1. More... | |
| SlotConfiguration | slot2 |
| Configuration for slot 2. More... | |
| SlotConfiguration | slot3 |
| Configuration for slot 3. More... | |
| bool | auxPIDPolarity |
| PID polarity inversion. More... | |
| FilterConfiguration | remoteFilter0 |
| Configuration for RemoteFilter 0. More... | |
| FilterConfiguration | remoteFilter1 |
| Configuration for RemoteFilter 1. More... | |
| double | motionCruiseVelocity |
| Motion Magic cruise velocity in raw sensor units per 100 ms. More... | |
| double | motionAcceleration |
| Motion Magic acceleration in (raw sensor units per 100 ms) per second. More... | |
| int | motionCurveStrength |
| Zero to use trapezoidal motion during motion magic. More... | |
| int | motionProfileTrajectoryPeriod |
| Motion profile base trajectory period in milliseconds. More... | |
| bool | feedbackNotContinuous |
| Determine whether feedback sensor is continuous or not. More... | |
| bool | remoteSensorClosedLoopDisableNeutralOnLOS |
| Disable neutral'ing the motor when remote sensor is lost on CAN bus. More... | |
| bool | clearPositionOnLimitF |
| Clear the position on forward limit. More... | |
| bool | clearPositionOnLimitR |
| Clear the position on reverse limit. More... | |
| bool | clearPositionOnQuadIdx |
| Clear the position on index. More... | |
| bool | limitSwitchDisableNeutralOnLOS |
| Disable neutral'ing the motor when remote limit switch is lost on CAN bus. More... | |
| bool | softLimitDisableNeutralOnLOS |
| Disable neutral'ing the motor when remote soft limit is lost on CAN bus. More... | |
| int | pulseWidthPeriod_EdgesPerRot |
| Number of edges per rotation for a tachometer sensor. More... | |
| int | pulseWidthPeriod_FilterWindowSz |
| Desired window size for a tachometer sensor. More... | |
| bool | trajectoryInterpolationEnable |
| Enable motion profile trajectory point interpolation (defaults to true). More... | |
| Public Attributes inherited from ctre::phoenix::CustomParamConfiguration | |
| int | customParam0 |
| Custom Param 0. More... | |
| int | customParam1 |
| Custom Param 1. More... | |
| bool | enableOptimizations |
| Enable optimizations for ConfigAll (defaults true) More... | |
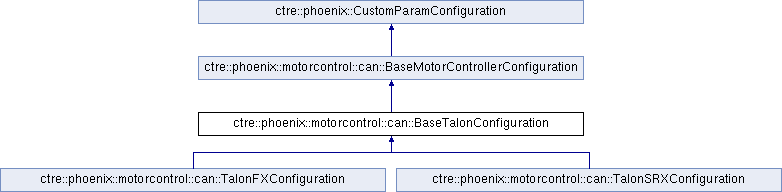
Detailed Description
Configurables available to BaseTalon.
Constructor & Destructor Documentation
◆ BaseTalonConfiguration()
|
inline |
Member Function Documentation
◆ toString() [1/2]
|
inline |
- Returns
- String representation of all the configs
◆ toString() [2/2]
|
inline |
- Parameters
-
prependString String to prepend to all the configs
- Returns
- String representation of all the configs
Member Data Documentation
◆ auxiliaryPID
| BaseTalonPIDSetConfiguration ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::auxiliaryPID |
Auxiliary PID configuration.
◆ diff0Term
| FeedbackDevice ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::diff0Term |
Feedback Device for Diff 0 Term Note the FeedbackDevice enum holds all possible sensor types.
Consult product documentation to confirm what is available. Alternatively the product specific enum can be used instead.
◆ diff1Term
| FeedbackDevice ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::diff1Term |
Feedback Device for Diff 1 Term Note the FeedbackDevice enum holds all possible sensor types.
Consult product documentation to confirm what is available. Alternatively the product specific enum can be used instead.
◆ forwardLimitSwitchDeviceID
| int ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::forwardLimitSwitchDeviceID |
Forward limit switch device ID.
Limit Switch device id isn't used unless device is a remote
◆ forwardLimitSwitchNormal
| LimitSwitchNormal ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::forwardLimitSwitchNormal |
Forward limit switch normally open/closed.
◆ forwardLimitSwitchSource
| LimitSwitchSource ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::forwardLimitSwitchSource |
Forward Limit Switch Source.
User can choose between the feedback connector, remote Talon SRX, CANifier, or deactivate the feature
◆ primaryPID
| BaseTalonPIDSetConfiguration ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::primaryPID |
Primary PID configuration.
◆ reverseLimitSwitchDeviceID
| int ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::reverseLimitSwitchDeviceID |
Reverse limit switch device ID.
Limit Switch device id isn't used unless device is a remote
◆ reverseLimitSwitchNormal
| LimitSwitchNormal ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::reverseLimitSwitchNormal |
Reverse limit switch normally open/closed.
◆ reverseLimitSwitchSource
| LimitSwitchSource ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::reverseLimitSwitchSource |
Reverse Limit Switch Source.
User can choose between the feedback connector, remote Talon SRX, CANifier, or deactivate the feature
◆ sum0Term
| FeedbackDevice ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::sum0Term |
Feedback Device for Sum 0 Term Note the FeedbackDevice enum holds all possible sensor types.
Consult product documentation to confirm what is available. Alternatively the product specific enum can be used instead.
◆ sum1Term
| FeedbackDevice ctre::phoenix::motorcontrol::can::BaseTalonConfiguration::sum1Term |
Feedback Device for Sum 1 Term Note the FeedbackDevice enum holds all possible sensor types.
Consult product documentation to confirm what is available. Alternatively the product specific enum can be used instead.
The documentation for this struct was generated from the following file:
- ctre/phoenix/motorcontrol/can/BaseTalon.h