Pigeon IMU Class. More...
#include <ctre/phoenix/sensors/BasePigeon.h>
Public Member Functions | |
| BasePigeon (int deviceNumber, std::string const &version, std::string const &canbus="") | |
| Create a Pigeon object that communicates with Pigeon on CAN Bus. | |
| ~BasePigeon () | |
| int | SetYaw (double angleDeg, int timeoutMs=0) |
| Sets the Yaw register to the specified value. | |
| int | AddYaw (double angleDeg, int timeoutMs=0) |
| Atomically add to the Yaw register. | |
| int | SetYawToCompass (int timeoutMs=0) |
| Sets the Yaw register to match the current compass value. | |
| int | SetAccumZAngle (double angleDeg, int timeoutMs=0) |
| Sets the AccumZAngle. | |
| ErrorCode | GetLastError () const |
| Call GetLastError() generated by this object. | |
| ErrorCode | Get6dQuaternion (double wxyz[4]) const |
| Get 6d Quaternion data. | |
| ErrorCode | GetYawPitchRoll (double ypr[3]) const |
| Get Yaw, Pitch, and Roll data. | |
| double | GetYaw () const |
| Get the yaw from the Pigeon. | |
| double | GetPitch () const |
| Get the pitch from the Pigeon. | |
| double | GetRoll () const |
| Get the roll from the Pigeon. | |
| int | GetAccumGyro (double xyz_deg[3]) const |
| Get AccumGyro data. | |
| double | GetAbsoluteCompassHeading () const |
| Get the absolute compass heading. | |
| double | GetCompassHeading () const |
| Get the continuous compass heading. | |
| double | GetCompassFieldStrength () const |
| Gets the compass' measured magnetic field strength. | |
| double | GetTemp () const |
| Gets the temperature of the pigeon. | |
| uint32_t | GetUpTime () const |
| Gets the current Pigeon uptime. | |
| int | GetRawMagnetometer (int16_t rm_xyz[3]) const |
| Get Raw Magnetometer data. | |
| int | GetBiasedMagnetometer (int16_t bm_xyz[3]) const |
| Get Biased Magnetometer data. | |
| int | GetBiasedAccelerometer (int16_t ba_xyz[3]) const |
| Get Biased Accelerometer data. | |
| int | GetRawGyro (double xyz_dps[3]) const |
| Get Raw Gyro data. | |
| uint32_t | GetResetCount () const |
| uint32_t | GetResetFlags () const |
| uint32_t | GetFirmVers () const |
| bool | HasResetOccurred () const |
| ErrorCode | ConfigSetCustomParam (int newValue, int paramIndex, int timeoutMs=0) |
| Sets the value of a custom parameter. | |
| int | ConfigGetCustomParam (int paramIndex, int timeoutMs=0) |
| Gets the value of a custom parameter. | |
| ErrorCode | ConfigSetParameter (ParamEnum param, double value, uint8_t subValue, int ordinal, int timeoutMs=0) |
| Sets a parameter. | |
| double | ConfigGetParameter (ctre::phoenix::ParamEnum param, int ordinal, int timeoutMs=0) |
| Gets a parameter. | |
| ErrorCode | ConfigGetParameter (ParamEnum param, int32_t valueToSend, int32_t &valueReceived, uint8_t &subValue, int32_t ordinal, int32_t timeoutMs) |
| Gets a parameter by passing an int by reference. | |
| ErrorCode | SetStatusFramePeriod (PigeonIMU_StatusFrame statusFrame, uint8_t periodMs, int timeoutMs=0) |
| Sets the period of the given status frame. | |
| int | GetStatusFramePeriod (PigeonIMU_StatusFrame frame, int timeoutMs=0) |
| Gets the period of the given status frame. | |
| ErrorCode | SetControlFramePeriod (PigeonIMU_ControlFrame frame, int periodMs) |
| Sets the period of the given control frame. | |
| int | GetFirmwareVersion () |
| Gets the firmware version of the device. | |
| ErrorCode | ClearStickyFaults (int timeoutMs=0) |
| Clears the Sticky Faults. | |
| void * | GetLowLevelHandle () const |
| virtual ctre::phoenix::ErrorCode | ConfigAllSettings (const BasePigeonConfiguration &allConfigs, int timeoutMs=50) |
| Configures all persistent settings. | |
| virtual void | GetAllConfigs (BasePigeonConfiguration &allConfigs, int timeoutMs=50) |
| Gets all persistant settings. | |
| virtual ErrorCode | ConfigFactoryDefault (int timeoutMs=50) |
| Configures all persistent settings to defaults. | |
| virtual BasePigeonSimCollection & | GetSimCollection () |
 Public Member Functions inherited from ctre::phoenix::CANBusAddressable Public Member Functions inherited from ctre::phoenix::CANBusAddressable | |
| CANBusAddressable (int deviceNumber) | |
| Constructor for a CANBusAddressable device. | |
| int | GetDeviceNumber () |
Static Public Member Functions | |
| static void | DestroyAllBasePigeons () |
| Destructs all pigeon objects. | |
Protected Member Functions | |
| BasePigeon (ctre::phoenix::motorcontrol::can::TalonSRX &talonSrx) | |
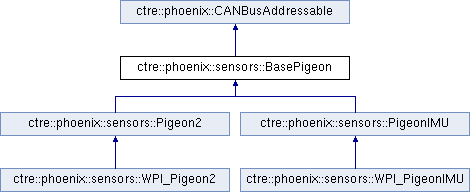
Detailed Description
Pigeon IMU Class.
Class supports communicating over CANbus and over ribbon-cable (CAN Talon SRX).
Constructor & Destructor Documentation
◆ BasePigeon() [1/2]
| ctre::phoenix::sensors::BasePigeon::BasePigeon | ( | int | deviceNumber, |
| std::string const & | version, | ||
| std::string const & | canbus = "" ) |
Create a Pigeon object that communicates with Pigeon on CAN Bus.
- Parameters
-
deviceNumber CAN Device Id of Pigeon [0,62] canbus Name of the CANbus; can be a SocketCAN interface (on Linux), or a CANivore device name or serial number
◆ ~BasePigeon()
| ctre::phoenix::sensors::BasePigeon::~BasePigeon | ( | ) |
◆ BasePigeon() [2/2]
|
protected |
Member Function Documentation
◆ AddYaw()
| int ctre::phoenix::sensors::BasePigeon::AddYaw | ( | double | angleDeg, |
| int | timeoutMs = 0 ) |
Atomically add to the Yaw register.
- Parameters
-
angleDeg Degrees to add to the Yaw register. timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ ClearStickyFaults()
| ErrorCode ctre::phoenix::sensors::BasePigeon::ClearStickyFaults | ( | int | timeoutMs = 0 | ) |
Clears the Sticky Faults.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ ConfigAllSettings()
|
virtual |
Configures all persistent settings.
- Parameters
-
allConfigs Object with all of the persistant settings timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ ConfigFactoryDefault()
|
virtual |
Configures all persistent settings to defaults.
- Parameters
-
timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
Reimplemented in ctre::phoenix::sensors::PigeonIMU.
◆ ConfigGetCustomParam()
| int ctre::phoenix::sensors::BasePigeon::ConfigGetCustomParam | ( | int | paramIndex, |
| int | timeoutMs = 0 ) |
Gets the value of a custom parameter.
This is for arbitrary use.
Sometimes it is necessary to save calibration/declination/offset information in the device. Particularly if the device is part of a subsystem that can be replaced.
- Parameters
-
paramIndex Index of custom parameter. [0-1] timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Value of the custom param.
◆ ConfigGetParameter() [1/2]
| double ctre::phoenix::sensors::BasePigeon::ConfigGetParameter | ( | ctre::phoenix::ParamEnum | param, |
| int | ordinal, | ||
| int | timeoutMs = 0 ) |
Gets a parameter.
Generally this is not used. This can be utilized in
- Using new features without updating API installation.
- Errata workarounds to circumvent API implementation.
- Allows for rapid testing / unit testing of firmware.
- Parameters
-
param Parameter enumeration. ordinal Ordinal of parameter. timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Value of parameter.
◆ ConfigGetParameter() [2/2]
| ErrorCode ctre::phoenix::sensors::BasePigeon::ConfigGetParameter | ( | ParamEnum | param, |
| int32_t | valueToSend, | ||
| int32_t & | valueReceived, | ||
| uint8_t & | subValue, | ||
| int32_t | ordinal, | ||
| int32_t | timeoutMs ) |
Gets a parameter by passing an int by reference.
- Parameters
-
param Parameter enumeration valueToSend Value to send to parameter valueReceived Reference to integer to receive subValue SubValue of parameter ordinal Ordinal of parameter timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ ConfigSetCustomParam()
| ErrorCode ctre::phoenix::sensors::BasePigeon::ConfigSetCustomParam | ( | int | newValue, |
| int | paramIndex, | ||
| int | timeoutMs = 0 ) |
Sets the value of a custom parameter.
This is for arbitrary use.
Sometimes it is necessary to save calibration/declination/offset information in the device. Particularly if the device is part of a subsystem that can be replaced.
- Parameters
-
newValue Value for custom parameter. paramIndex Index of custom parameter. [0-1] timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ ConfigSetParameter()
| ErrorCode ctre::phoenix::sensors::BasePigeon::ConfigSetParameter | ( | ParamEnum | param, |
| double | value, | ||
| uint8_t | subValue, | ||
| int | ordinal, | ||
| int | timeoutMs = 0 ) |
Sets a parameter.
Generally this is not used. This can be utilized in
- Using new features without updating API installation.
- Errata workarounds to circumvent API implementation.
- Allows for rapid testing / unit testing of firmware.
- Parameters
-
param Parameter enumeration. value Value of parameter. subValue Subvalue for parameter. Maximum value of 255. ordinal Ordinal of parameter. timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ DestroyAllBasePigeons()
|
static |
Destructs all pigeon objects.
◆ Get6dQuaternion()
| ErrorCode ctre::phoenix::sensors::BasePigeon::Get6dQuaternion | ( | double | wxyz[4] | ) | const |
Get 6d Quaternion data.
- Parameters
-
wxyz Array to fill with quaternion data w[0], x[1], y[2], z[3]
- Returns
- The last ErrorCode generated.
◆ GetAbsoluteCompassHeading()
| double ctre::phoenix::sensors::BasePigeon::GetAbsoluteCompassHeading | ( | ) | const |
Get the absolute compass heading.
- Returns
- compass heading [0,360) degrees.
◆ GetAccumGyro()
| int ctre::phoenix::sensors::BasePigeon::GetAccumGyro | ( | double | xyz_deg[3] | ) | const |
Get AccumGyro data.
AccumGyro is the integrated gyro value on each axis.
- Parameters
-
xyz_deg Array to fill with x[0], y[1], and z[2] AccumGyro data
- Returns
- The last ErrorCode generated.
◆ GetAllConfigs()
|
virtual |
Gets all persistant settings.
- Parameters
-
allConfigs Object with all of the persistant settings timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
◆ GetBiasedAccelerometer()
| int ctre::phoenix::sensors::BasePigeon::GetBiasedAccelerometer | ( | int16_t | ba_xyz[3] | ) | const |
Get Biased Accelerometer data.
- Parameters
-
ba_xyz Array to fill with x[0], y[1], and z[2] data. These are in fixed point notation Q2.14. eg. 16384 = 1G
- Returns
- The last ErrorCode generated.
◆ GetBiasedMagnetometer()
| int ctre::phoenix::sensors::BasePigeon::GetBiasedMagnetometer | ( | int16_t | bm_xyz[3] | ) | const |
Get Biased Magnetometer data.
- Parameters
-
bm_xyz Array to fill with x[0], y[1], and z[2] data Number is equal to 0.6 microTeslas per unit.
- Returns
- The last ErrorCode generated.
◆ GetCompassFieldStrength()
| double ctre::phoenix::sensors::BasePigeon::GetCompassFieldStrength | ( | ) | const |
Gets the compass' measured magnetic field strength.
- Returns
- field strength in Microteslas (uT).
◆ GetCompassHeading()
| double ctre::phoenix::sensors::BasePigeon::GetCompassHeading | ( | ) | const |
Get the continuous compass heading.
- Returns
- continuous compass heading [-23040, 23040) degrees. Use SetCompassHeading to modify the wrap-around portion.
◆ GetFirmVers()
| uint32_t ctre::phoenix::sensors::BasePigeon::GetFirmVers | ( | ) | const |
- Returns
- firmware version of Pigeon
◆ GetFirmwareVersion()
| int ctre::phoenix::sensors::BasePigeon::GetFirmwareVersion | ( | ) |
Gets the firmware version of the device.
- Returns
- param holds the firmware version of the device. Device must be powered cycled at least once.
◆ GetLastError()
| ErrorCode ctre::phoenix::sensors::BasePigeon::GetLastError | ( | ) | const |
Call GetLastError() generated by this object.
Not all functions return an error code but can potentially report errors.
This function can be used to retrieve those error codes.
- Returns
- The last ErrorCode generated.
◆ GetLowLevelHandle()
|
inline |
- Returns
- Pigeon resource handle.
◆ GetPitch()
| double ctre::phoenix::sensors::BasePigeon::GetPitch | ( | ) | const |
Get the pitch from the Pigeon.
- Returns
- Pitch
◆ GetRawGyro()
| int ctre::phoenix::sensors::BasePigeon::GetRawGyro | ( | double | xyz_dps[3] | ) | const |
Get Raw Gyro data.
- Parameters
-
xyz_dps Array to fill with x[0], y[1], and z[2] data in degrees per second.
- Returns
- The last ErrorCode generated.
◆ GetRawMagnetometer()
| int ctre::phoenix::sensors::BasePigeon::GetRawMagnetometer | ( | int16_t | rm_xyz[3] | ) | const |
Get Raw Magnetometer data.
- Parameters
-
rm_xyz Array to fill with x[0], y[1], and z[2] data Number is equal to 0.6 microTeslas per unit.
- Returns
- The last ErrorCode generated.
◆ GetResetCount()
| uint32_t ctre::phoenix::sensors::BasePigeon::GetResetCount | ( | ) | const |
- Returns
- number of times Pigeon Reset
◆ GetResetFlags()
| uint32_t ctre::phoenix::sensors::BasePigeon::GetResetFlags | ( | ) | const |
- Returns
- Reset flags for Pigeon
◆ GetRoll()
| double ctre::phoenix::sensors::BasePigeon::GetRoll | ( | ) | const |
Get the roll from the Pigeon.
- Returns
- Roll
◆ GetSimCollection()
|
virtual |
- Returns
- object that can set simulation inputs.
◆ GetStatusFramePeriod()
| int ctre::phoenix::sensors::BasePigeon::GetStatusFramePeriod | ( | PigeonIMU_StatusFrame | frame, |
| int | timeoutMs = 0 ) |
Gets the period of the given status frame.
- Parameters
-
frame Frame to get the period of. timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Period of the given status frame.
◆ GetTemp()
| double ctre::phoenix::sensors::BasePigeon::GetTemp | ( | ) | const |
Gets the temperature of the pigeon.
- Returns
- Temperature in ('C)
◆ GetUpTime()
| uint32_t ctre::phoenix::sensors::BasePigeon::GetUpTime | ( | ) | const |
Gets the current Pigeon uptime.
- Returns
- How long has Pigeon been running in whole seconds. Value caps at 255.
◆ GetYaw()
| double ctre::phoenix::sensors::BasePigeon::GetYaw | ( | ) | const |
Get the yaw from the Pigeon.
- Returns
- Yaw
◆ GetYawPitchRoll()
| ErrorCode ctre::phoenix::sensors::BasePigeon::GetYawPitchRoll | ( | double | ypr[3] | ) | const |
Get Yaw, Pitch, and Roll data.
- Parameters
-
ypr Array to fill with yaw[0], pitch[1], and roll[2] data. Yaw is within [-368,640, +368,640] degrees. Pitch is within [-90,+90] degrees. Roll is within [-90,+90] degrees.
- Returns
- The last ErrorCode generated.
◆ HasResetOccurred()
| bool ctre::phoenix::sensors::BasePigeon::HasResetOccurred | ( | ) | const |
- Returns
- true iff a reset has occurred since last call.
◆ SetAccumZAngle()
| int ctre::phoenix::sensors::BasePigeon::SetAccumZAngle | ( | double | angleDeg, |
| int | timeoutMs = 0 ) |
Sets the AccumZAngle.
- Parameters
-
angleDeg Degrees to set AccumZAngle to. timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ SetControlFramePeriod()
| ErrorCode ctre::phoenix::sensors::BasePigeon::SetControlFramePeriod | ( | PigeonIMU_ControlFrame | frame, |
| int | periodMs ) |
Sets the period of the given control frame.
- Parameters
-
frame Frame whose period is to be changed. periodMs Period in ms for the given frame.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ SetStatusFramePeriod()
| ErrorCode ctre::phoenix::sensors::BasePigeon::SetStatusFramePeriod | ( | PigeonIMU_StatusFrame | statusFrame, |
| uint8_t | periodMs, | ||
| int | timeoutMs = 0 ) |
Sets the period of the given status frame.
- Parameters
-
statusFrame Frame whose period is to be changed. periodMs Period in ms for the given frame. timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ SetYaw()
| int ctre::phoenix::sensors::BasePigeon::SetYaw | ( | double | angleDeg, |
| int | timeoutMs = 0 ) |
Sets the Yaw register to the specified value.
- Parameters
-
angleDeg Degree of Yaw [+/- 368,640 degrees] timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
◆ SetYawToCompass()
| int ctre::phoenix::sensors::BasePigeon::SetYawToCompass | ( | int | timeoutMs = 0 | ) |
Sets the Yaw register to match the current compass value.
- Parameters
-
timeoutMs Timeout value in ms. If nonzero, function will wait for config success and report an error if it times out. If zero, no blocking or checking is performed.
- Returns
- Error Code generated by function. 0 indicates no error.
The documentation for this class was generated from the following file:
- ctre/phoenix/sensors/BasePigeon.h