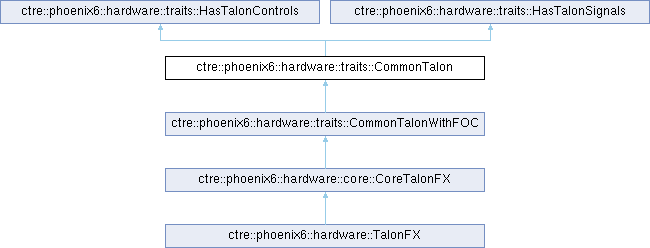
Contains everything common between Talon motor controllers. More...
#include <ctre/phoenix6/hardware/traits/CommonTalon.hpp>
Public Member Functions | |
| virtual | ~CommonTalon ()=default |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DutyCycleOut &request)=0 |
| Request a specified motor duty cycle. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::VoltageOut &request)=0 |
| Request a specified voltage. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::PositionDutyCycle &request)=0 |
| Request PID to target position with duty cycle feedforward. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::PositionVoltage &request)=0 |
| Request PID to target position with voltage feedforward. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::VelocityDutyCycle &request)=0 |
| Request PID to target velocity with duty cycle feedforward. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::VelocityVoltage &request)=0 |
| Request PID to target velocity with voltage feedforward. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::MotionMagicDutyCycle &request)=0 |
| Requests Motion Magic® to target a final position using a motion profile. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::MotionMagicVoltage &request)=0 |
| Requests Motion Magic® to target a final position using a motion profile. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::MotionMagicVelocityDutyCycle &request)=0 |
| Requests Motion Magic® to target a final velocity using a motion profile. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::MotionMagicVelocityVoltage &request)=0 |
| Requests Motion Magic® to target a final velocity using a motion profile. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::MotionMagicExpoDutyCycle &request)=0 |
| Requests Motion Magic® to target a final position using an exponential motion profile. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::MotionMagicExpoVoltage &request)=0 |
| Requests Motion Magic® to target a final position using an exponential motion profile. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DynamicMotionMagicDutyCycle &request)=0 |
| Requests Motion Magic® to target a final position using a motion profile. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DynamicMotionMagicVoltage &request)=0 |
| Requests Motion Magic® to target a final position using a motion profile. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialDutyCycle &request)=0 |
| Request a specified motor duty cycle with a differential position closed-loop. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialVoltage &request)=0 |
| Request a specified voltage with a differential position closed-loop. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialPositionDutyCycle &request)=0 |
| Request PID to target position with a differential position setpoint. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialPositionVoltage &request)=0 |
| Request PID to target position with a differential position setpoint. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialVelocityDutyCycle &request)=0 |
| Request PID to target velocity with a differential position setpoint. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialVelocityVoltage &request)=0 |
| Request PID to target velocity with a differential position setpoint. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialMotionMagicDutyCycle &request)=0 |
| Requests Motion Magic® to target a final position using a motion profile, and PID to a differential position setpoint. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialMotionMagicVoltage &request)=0 |
| Requests Motion Magic® to target a final position using a motion profile, and PID to a differential position setpoint. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::Follower &request)=0 |
| Follow the motor output of another Talon. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::StrictFollower &request)=0 |
| Follow the motor output of another Talon while ignoring the master's invert setting. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialFollower &request)=0 |
| Follow the differential motor output of another Talon. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::DifferentialStrictFollower &request)=0 |
| Follow the differential motor output of another Talon while ignoring the master's invert setting. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::StaticBrake &request)=0 |
| Applies full neutral-brake by shorting motor leads together. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::NeutralOut &request)=0 |
| Request neutral output of actuator. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::CoastOut &request)=0 |
| Request coast neutral output of actuator. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_DutyCycleOut_Position &request)=0 |
| Differential control with duty cycle average target and position difference target. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_PositionDutyCycle_Position &request)=0 |
| Differential control with position average target and position difference target using dutycycle control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_VelocityDutyCycle_Position &request)=0 |
| Differential control with velocity average target and position difference target using dutycycle control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_MotionMagicDutyCycle_Position &request)=0 |
| Differential control with Motion Magic® average target and position difference target using dutycycle control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_DutyCycleOut_Velocity &request)=0 |
| Differential control with duty cycle average target and velocity difference target. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_PositionDutyCycle_Velocity &request)=0 |
| Differential control with position average target and velocity difference target using dutycycle control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_VelocityDutyCycle_Velocity &request)=0 |
| Differential control with velocity average target and velocity difference target using dutycycle control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_MotionMagicDutyCycle_Velocity &request)=0 |
| Differential control with Motion Magic® average target and velocity difference target using dutycycle control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_VoltageOut_Position &request)=0 |
| Differential control with voltage average target and position difference target. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_PositionVoltage_Position &request)=0 |
| Differential control with position average target and position difference target using voltage control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_VelocityVoltage_Position &request)=0 |
| Differential control with velocity average target and position difference target using voltage control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_MotionMagicVoltage_Position &request)=0 |
| Differential control with Motion Magic® average target and position difference target using voltage control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_VoltageOut_Velocity &request)=0 |
| Differential control with voltage average target and velocity difference target. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_PositionVoltage_Velocity &request)=0 |
| Differential control with position average target and velocity difference target using voltage control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_VelocityVoltage_Velocity &request)=0 |
| Differential control with velocity average target and velocity difference target using voltage control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::compound::Diff_MotionMagicVoltage_Velocity &request)=0 |
| Differential control with Motion Magic® average target and velocity difference target using voltage control. | |
| virtual ctre::phoenix::StatusCode | SetControl (const controls::ControlRequest &request)=0 |
| Control device with generic control request object. | |
 Public Member Functions inherited from ctre::phoenix6::hardware::traits::HasTalonControls Public Member Functions inherited from ctre::phoenix6::hardware::traits::HasTalonControls | |
| virtual | ~HasTalonControls ()=default |
| Public Member Functions inherited from ctre::phoenix6::hardware::traits::HasTalonSignals | |
| virtual | ~HasTalonSignals ()=default |
| virtual StatusSignal< int > & | GetVersionMajor (bool refresh=true)=0 |
| App Major Version number. | |
| virtual StatusSignal< int > & | GetVersionMinor (bool refresh=true)=0 |
| App Minor Version number. | |
| virtual StatusSignal< int > & | GetVersionBugfix (bool refresh=true)=0 |
| App Bugfix Version number. | |
| virtual StatusSignal< int > & | GetVersionBuild (bool refresh=true)=0 |
| App Build Version number. | |
| virtual StatusSignal< int > & | GetVersion (bool refresh=true)=0 |
| Full Version of firmware in device. | |
| virtual StatusSignal< int > & | GetFaultField (bool refresh=true)=0 |
| Integer representing all fault flags reported by the device. | |
| virtual StatusSignal< int > & | GetStickyFaultField (bool refresh=true)=0 |
| Integer representing all (persistent) sticky fault flags reported by the device. | |
| virtual StatusSignal< units::voltage::volt_t > & | GetMotorVoltage (bool refresh=true)=0 |
| The applied (output) motor voltage. | |
| virtual StatusSignal< signals::ForwardLimitValue > & | GetForwardLimit (bool refresh=true)=0 |
| Forward Limit Pin. | |
| virtual StatusSignal< signals::ReverseLimitValue > & | GetReverseLimit (bool refresh=true)=0 |
| Reverse Limit Pin. | |
| virtual StatusSignal< signals::AppliedRotorPolarityValue > & | GetAppliedRotorPolarity (bool refresh=true)=0 |
| The applied rotor polarity as seen from the front of the motor. | |
| virtual StatusSignal< units::dimensionless::scalar_t > & | GetDutyCycle (bool refresh=true)=0 |
| The applied motor duty cycle. | |
| virtual StatusSignal< units::current::ampere_t > & | GetTorqueCurrent (bool refresh=true)=0 |
| Current corresponding to the torque output by the motor. | |
| virtual StatusSignal< units::current::ampere_t > & | GetStatorCurrent (bool refresh=true)=0 |
| Current corresponding to the stator windings. | |
| virtual StatusSignal< units::current::ampere_t > & | GetSupplyCurrent (bool refresh=true)=0 |
| Measured supply side current. | |
| virtual StatusSignal< units::voltage::volt_t > & | GetSupplyVoltage (bool refresh=true)=0 |
| Measured supply voltage to the device. | |
| virtual StatusSignal< units::temperature::celsius_t > & | GetDeviceTemp (bool refresh=true)=0 |
| Temperature of device. | |
| virtual StatusSignal< units::temperature::celsius_t > & | GetProcessorTemp (bool refresh=true)=0 |
| Temperature of the processor. | |
| virtual StatusSignal< units::angular_velocity::turns_per_second_t > & | GetRotorVelocity (bool refresh=true)=0 |
| Velocity of the motor rotor. | |
| virtual StatusSignal< units::angle::turn_t > & | GetRotorPosition (bool refresh=true)=0 |
| Position of the motor rotor. | |
| virtual StatusSignal< units::angular_velocity::turns_per_second_t > & | GetVelocity (bool refresh=true)=0 |
| Velocity of the device in mechanism rotations per second. | |
| virtual StatusSignal< units::angle::turn_t > & | GetPosition (bool refresh=true)=0 |
| Position of the device in mechanism rotations. | |
| virtual StatusSignal< units::angular_acceleration::turns_per_second_squared_t > & | GetAcceleration (bool refresh=true)=0 |
| Acceleration of the device in mechanism rotations per second². | |
| virtual StatusSignal< signals::ControlModeValue > & | GetControlMode (bool refresh=true)=0 |
| The active control mode of the motor controller. | |
| virtual StatusSignal< signals::MotionMagicIsRunningValue > & | GetMotionMagicIsRunning (bool refresh=true)=0 |
| Check if Motion Magic® is running. | |
| virtual StatusSignal< signals::RobotEnableValue > & | GetRobotEnable (bool refresh=true)=0 |
| Indicates if the robot is enabled. | |
| virtual StatusSignal< signals::DeviceEnableValue > & | GetDeviceEnable (bool refresh=true)=0 |
| Indicates if device is actuator enabled. | |
| virtual StatusSignal< int > & | GetClosedLoopSlot (bool refresh=true)=0 |
| The slot that the closed-loop PID is using. | |
| virtual StatusSignal< signals::MotorOutputStatusValue > & | GetMotorOutputStatus (bool refresh=true)=0 |
| Assess the status of the motor output with respect to load and supply. | |
| virtual StatusSignal< signals::DifferentialControlModeValue > & | GetDifferentialControlMode (bool refresh=true)=0 |
| The active control mode of the differential controller. | |
| virtual StatusSignal< units::angular_velocity::turns_per_second_t > & | GetDifferentialAverageVelocity (bool refresh=true)=0 |
| Average component of the differential velocity of device. | |
| virtual StatusSignal< units::angle::turn_t > & | GetDifferentialAveragePosition (bool refresh=true)=0 |
| Average component of the differential position of device. | |
| virtual StatusSignal< units::angular_velocity::turns_per_second_t > & | GetDifferentialDifferenceVelocity (bool refresh=true)=0 |
| Difference component of the differential velocity of device. | |
| virtual StatusSignal< units::angle::turn_t > & | GetDifferentialDifferencePosition (bool refresh=true)=0 |
| Difference component of the differential position of device. | |
| virtual StatusSignal< int > & | GetDifferentialClosedLoopSlot (bool refresh=true)=0 |
| The slot that the closed-loop differential PID is using. | |
| virtual StatusSignal< ctre::unit::newton_meters_per_ampere_t > & | GetMotorKT (bool refresh=true)=0 |
| The torque constant (K_T) of the motor. | |
| virtual StatusSignal< ctre::unit::rpm_per_volt_t > & | GetMotorKV (bool refresh=true)=0 |
| The velocity constant (K_V) of the motor. | |
| virtual StatusSignal< units::current::ampere_t > & | GetMotorStallCurrent (bool refresh=true)=0 |
| The stall current of the motor at 12 V output. | |
| virtual StatusSignal< signals::BridgeOutputValue > & | GetBridgeOutput (bool refresh=true)=0 |
| The applied output of the bridge. | |
| virtual StatusSignal< bool > & | GetIsProLicensed (bool refresh=true)=0 |
| Whether the device is Phoenix Pro licensed. | |
| virtual StatusSignal< units::temperature::celsius_t > & | GetAncillaryDeviceTemp (bool refresh=true)=0 |
| Temperature of device from second sensor. | |
| virtual StatusSignal< signals::ConnectedMotorValue > & | GetConnectedMotor (bool refresh=true)=0 |
| The type of motor attached to the Talon. | |
| virtual StatusSignal< bool > & | GetFault_Hardware (bool refresh=true)=0 |
| Hardware fault occurred. | |
| virtual StatusSignal< bool > & | GetStickyFault_Hardware (bool refresh=true)=0 |
| Hardware fault occurred. | |
| virtual StatusSignal< bool > & | GetFault_ProcTemp (bool refresh=true)=0 |
| Processor temperature exceeded limit. | |
| virtual StatusSignal< bool > & | GetStickyFault_ProcTemp (bool refresh=true)=0 |
| Processor temperature exceeded limit. | |
| virtual StatusSignal< bool > & | GetFault_DeviceTemp (bool refresh=true)=0 |
| Device temperature exceeded limit. | |
| virtual StatusSignal< bool > & | GetStickyFault_DeviceTemp (bool refresh=true)=0 |
| Device temperature exceeded limit. | |
| virtual StatusSignal< bool > & | GetFault_Undervoltage (bool refresh=true)=0 |
| Device supply voltage dropped to near brownout levels. | |
| virtual StatusSignal< bool > & | GetStickyFault_Undervoltage (bool refresh=true)=0 |
| Device supply voltage dropped to near brownout levels. | |
| virtual StatusSignal< bool > & | GetFault_BootDuringEnable (bool refresh=true)=0 |
| Device boot while detecting the enable signal. | |
| virtual StatusSignal< bool > & | GetStickyFault_BootDuringEnable (bool refresh=true)=0 |
| Device boot while detecting the enable signal. | |
| virtual StatusSignal< bool > & | GetFault_UnlicensedFeatureInUse (bool refresh=true)=0 |
| An unlicensed feature is in use, device may not behave as expected. | |
| virtual StatusSignal< bool > & | GetStickyFault_UnlicensedFeatureInUse (bool refresh=true)=0 |
| An unlicensed feature is in use, device may not behave as expected. | |
| virtual StatusSignal< bool > & | GetFault_BridgeBrownout (bool refresh=true)=0 |
| Bridge was disabled most likely due to supply voltage dropping too low. | |
| virtual StatusSignal< bool > & | GetStickyFault_BridgeBrownout (bool refresh=true)=0 |
| Bridge was disabled most likely due to supply voltage dropping too low. | |
| virtual StatusSignal< bool > & | GetFault_RemoteSensorReset (bool refresh=true)=0 |
| The remote sensor has reset. | |
| virtual StatusSignal< bool > & | GetStickyFault_RemoteSensorReset (bool refresh=true)=0 |
| The remote sensor has reset. | |
| virtual StatusSignal< bool > & | GetFault_MissingDifferentialFX (bool refresh=true)=0 |
| The remote Talon used for differential control is not present on CAN Bus. | |
| virtual StatusSignal< bool > & | GetStickyFault_MissingDifferentialFX (bool refresh=true)=0 |
| The remote Talon used for differential control is not present on CAN Bus. | |
| virtual StatusSignal< bool > & | GetFault_RemoteSensorPosOverflow (bool refresh=true)=0 |
| The remote sensor position has overflowed. | |
| virtual StatusSignal< bool > & | GetStickyFault_RemoteSensorPosOverflow (bool refresh=true)=0 |
| The remote sensor position has overflowed. | |
| virtual StatusSignal< bool > & | GetFault_OverSupplyV (bool refresh=true)=0 |
| Supply Voltage has exceeded the maximum voltage rating of device. | |
| virtual StatusSignal< bool > & | GetStickyFault_OverSupplyV (bool refresh=true)=0 |
| Supply Voltage has exceeded the maximum voltage rating of device. | |
| virtual StatusSignal< bool > & | GetFault_UnstableSupplyV (bool refresh=true)=0 |
| Supply Voltage is unstable. | |
| virtual StatusSignal< bool > & | GetStickyFault_UnstableSupplyV (bool refresh=true)=0 |
| Supply Voltage is unstable. | |
| virtual StatusSignal< bool > & | GetFault_ReverseHardLimit (bool refresh=true)=0 |
| Reverse limit switch has been asserted. | |
| virtual StatusSignal< bool > & | GetStickyFault_ReverseHardLimit (bool refresh=true)=0 |
| Reverse limit switch has been asserted. | |
| virtual StatusSignal< bool > & | GetFault_ForwardHardLimit (bool refresh=true)=0 |
| Forward limit switch has been asserted. | |
| virtual StatusSignal< bool > & | GetStickyFault_ForwardHardLimit (bool refresh=true)=0 |
| Forward limit switch has been asserted. | |
| virtual StatusSignal< bool > & | GetFault_ReverseSoftLimit (bool refresh=true)=0 |
| Reverse soft limit has been asserted. | |
| virtual StatusSignal< bool > & | GetStickyFault_ReverseSoftLimit (bool refresh=true)=0 |
| Reverse soft limit has been asserted. | |
| virtual StatusSignal< bool > & | GetFault_ForwardSoftLimit (bool refresh=true)=0 |
| Forward soft limit has been asserted. | |
| virtual StatusSignal< bool > & | GetStickyFault_ForwardSoftLimit (bool refresh=true)=0 |
| Forward soft limit has been asserted. | |
| virtual StatusSignal< bool > & | GetFault_MissingSoftLimitRemote (bool refresh=true)=0 |
| The remote soft limit device is not present on CAN Bus. | |
| virtual StatusSignal< bool > & | GetStickyFault_MissingSoftLimitRemote (bool refresh=true)=0 |
| The remote soft limit device is not present on CAN Bus. | |
| virtual StatusSignal< bool > & | GetFault_MissingHardLimitRemote (bool refresh=true)=0 |
| The remote limit switch device is not present on CAN Bus. | |
| virtual StatusSignal< bool > & | GetStickyFault_MissingHardLimitRemote (bool refresh=true)=0 |
| The remote limit switch device is not present on CAN Bus. | |
| virtual StatusSignal< bool > & | GetFault_RemoteSensorDataInvalid (bool refresh=true)=0 |
| The remote sensor's data is no longer trusted. | |
| virtual StatusSignal< bool > & | GetStickyFault_RemoteSensorDataInvalid (bool refresh=true)=0 |
| The remote sensor's data is no longer trusted. | |
| virtual StatusSignal< bool > & | GetFault_FusedSensorOutOfSync (bool refresh=true)=0 |
| The remote sensor used for fusion has fallen out of sync to the local sensor. | |
| virtual StatusSignal< bool > & | GetStickyFault_FusedSensorOutOfSync (bool refresh=true)=0 |
| The remote sensor used for fusion has fallen out of sync to the local sensor. | |
| virtual StatusSignal< bool > & | GetFault_StatorCurrLimit (bool refresh=true)=0 |
| Stator current limit occured. | |
| virtual StatusSignal< bool > & | GetStickyFault_StatorCurrLimit (bool refresh=true)=0 |
| Stator current limit occured. | |
| virtual StatusSignal< bool > & | GetFault_SupplyCurrLimit (bool refresh=true)=0 |
| Supply current limit occured. | |
| virtual StatusSignal< bool > & | GetStickyFault_SupplyCurrLimit (bool refresh=true)=0 |
| Supply current limit occured. | |
| virtual StatusSignal< bool > & | GetFault_UsingFusedCANcoderWhileUnlicensed (bool refresh=true)=0 |
| Using Fused CANcoder feature while unlicensed. | |
| virtual StatusSignal< bool > & | GetStickyFault_UsingFusedCANcoderWhileUnlicensed (bool refresh=true)=0 |
| Using Fused CANcoder feature while unlicensed. | |
| virtual StatusSignal< bool > & | GetFault_StaticBrakeDisabled (bool refresh=true)=0 |
| Static brake was momentarily disabled due to excessive braking current while disabled. | |
| virtual StatusSignal< bool > & | GetStickyFault_StaticBrakeDisabled (bool refresh=true)=0 |
| Static brake was momentarily disabled due to excessive braking current while disabled. | |
| virtual StatusSignal< double > & | GetClosedLoopProportionalOutput (bool refresh=true)=0 |
| Closed loop proportional component. | |
| virtual StatusSignal< double > & | GetClosedLoopIntegratedOutput (bool refresh=true)=0 |
| Closed loop integrated component. | |
| virtual StatusSignal< double > & | GetClosedLoopFeedForward (bool refresh=true)=0 |
| Feedforward passed by the user. | |
| virtual StatusSignal< double > & | GetClosedLoopDerivativeOutput (bool refresh=true)=0 |
| Closed loop derivative component. | |
| virtual StatusSignal< double > & | GetClosedLoopOutput (bool refresh=true)=0 |
| Closed loop total output. | |
| virtual StatusSignal< double > & | GetClosedLoopReference (bool refresh=true)=0 |
| Value that the closed loop is targeting. | |
| virtual StatusSignal< double > & | GetClosedLoopReferenceSlope (bool refresh=true)=0 |
| Derivative of the target that the closed loop is targeting. | |
| virtual StatusSignal< double > & | GetClosedLoopError (bool refresh=true)=0 |
| The difference between target reference and current measurement. | |
| virtual StatusSignal< double > & | GetDifferentialOutput (bool refresh=true)=0 |
| The calculated motor output for differential followers. | |
| virtual StatusSignal< double > & | GetDifferentialClosedLoopProportionalOutput (bool refresh=true)=0 |
| Differential closed loop proportional component. | |
| virtual StatusSignal< double > & | GetDifferentialClosedLoopIntegratedOutput (bool refresh=true)=0 |
| Differential closed loop integrated component. | |
| virtual StatusSignal< double > & | GetDifferentialClosedLoopFeedForward (bool refresh=true)=0 |
| Differential Feedforward passed by the user. | |
| virtual StatusSignal< double > & | GetDifferentialClosedLoopDerivativeOutput (bool refresh=true)=0 |
| Differential closed loop derivative component. | |
| virtual StatusSignal< double > & | GetDifferentialClosedLoopOutput (bool refresh=true)=0 |
| Differential closed loop total output. | |
| virtual StatusSignal< double > & | GetDifferentialClosedLoopReference (bool refresh=true)=0 |
| Value that the differential closed loop is targeting. | |
| virtual StatusSignal< double > & | GetDifferentialClosedLoopReferenceSlope (bool refresh=true)=0 |
| Derivative of the target that the differential closed loop is targeting. | |
| virtual StatusSignal< double > & | GetDifferentialClosedLoopError (bool refresh=true)=0 |
| The difference between target differential reference and current measurement. | |
| virtual ctre::phoenix::StatusCode | SetPosition (units::angle::turn_t newValue, units::time::second_t timeoutSeconds)=0 |
| Sets the mechanism position of the device in mechanism rotations. | |
| virtual ctre::phoenix::StatusCode | SetPosition (units::angle::turn_t newValue)=0 |
| Sets the mechanism position of the device in mechanism rotations. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFaults (units::time::second_t timeoutSeconds)=0 |
| Clear the sticky faults in the device. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFaults ()=0 |
| Clear the sticky faults in the device. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_Hardware (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Hardware fault occurred. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_Hardware ()=0 |
| Clear sticky fault: Hardware fault occurred. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ProcTemp (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Processor temperature exceeded limit. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ProcTemp ()=0 |
| Clear sticky fault: Processor temperature exceeded limit. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_DeviceTemp (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Device temperature exceeded limit. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_DeviceTemp ()=0 |
| Clear sticky fault: Device temperature exceeded limit. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_Undervoltage (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Device supply voltage dropped to near brownout levels. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_Undervoltage ()=0 |
| Clear sticky fault: Device supply voltage dropped to near brownout levels. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_BootDuringEnable (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Device boot while detecting the enable signal. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_BootDuringEnable ()=0 |
| Clear sticky fault: Device boot while detecting the enable signal. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_UnlicensedFeatureInUse (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: An unlicensed feature is in use, device may not behave as expected. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_UnlicensedFeatureInUse ()=0 |
| Clear sticky fault: An unlicensed feature is in use, device may not behave as expected. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_BridgeBrownout (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Bridge was disabled most likely due to supply voltage dropping too low. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_BridgeBrownout ()=0 |
| Clear sticky fault: Bridge was disabled most likely due to supply voltage dropping too low. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_RemoteSensorReset (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: The remote sensor has reset. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_RemoteSensorReset ()=0 |
| Clear sticky fault: The remote sensor has reset. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_MissingDifferentialFX (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: The remote Talon used for differential control is not present on CAN Bus. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_MissingDifferentialFX ()=0 |
| Clear sticky fault: The remote Talon used for differential control is not present on CAN Bus. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_RemoteSensorPosOverflow (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: The remote sensor position has overflowed. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_RemoteSensorPosOverflow ()=0 |
| Clear sticky fault: The remote sensor position has overflowed. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_OverSupplyV (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Supply Voltage has exceeded the maximum voltage rating of device. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_OverSupplyV ()=0 |
| Clear sticky fault: Supply Voltage has exceeded the maximum voltage rating of device. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_UnstableSupplyV (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Supply Voltage is unstable. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_UnstableSupplyV ()=0 |
| Clear sticky fault: Supply Voltage is unstable. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ReverseHardLimit (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Reverse limit switch has been asserted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ReverseHardLimit ()=0 |
| Clear sticky fault: Reverse limit switch has been asserted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ForwardHardLimit (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Forward limit switch has been asserted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ForwardHardLimit ()=0 |
| Clear sticky fault: Forward limit switch has been asserted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ReverseSoftLimit (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Reverse soft limit has been asserted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ReverseSoftLimit ()=0 |
| Clear sticky fault: Reverse soft limit has been asserted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ForwardSoftLimit (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Forward soft limit has been asserted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_ForwardSoftLimit ()=0 |
| Clear sticky fault: Forward soft limit has been asserted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_MissingSoftLimitRemote (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: The remote soft limit device is not present on CAN Bus. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_MissingSoftLimitRemote ()=0 |
| Clear sticky fault: The remote soft limit device is not present on CAN Bus. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_MissingHardLimitRemote (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: The remote limit switch device is not present on CAN Bus. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_MissingHardLimitRemote ()=0 |
| Clear sticky fault: The remote limit switch device is not present on CAN Bus. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_RemoteSensorDataInvalid (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: The remote sensor's data is no longer trusted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_RemoteSensorDataInvalid ()=0 |
| Clear sticky fault: The remote sensor's data is no longer trusted. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_FusedSensorOutOfSync (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: The remote sensor used for fusion has fallen out of sync to the local sensor. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_FusedSensorOutOfSync ()=0 |
| Clear sticky fault: The remote sensor used for fusion has fallen out of sync to the local sensor. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_StatorCurrLimit (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Stator current limit occured. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_StatorCurrLimit ()=0 |
| Clear sticky fault: Stator current limit occured. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_SupplyCurrLimit (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Supply current limit occured. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_SupplyCurrLimit ()=0 |
| Clear sticky fault: Supply current limit occured. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_UsingFusedCANcoderWhileUnlicensed (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Using Fused CANcoder feature while unlicensed. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_UsingFusedCANcoderWhileUnlicensed ()=0 |
| Clear sticky fault: Using Fused CANcoder feature while unlicensed. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_StaticBrakeDisabled (units::time::second_t timeoutSeconds)=0 |
| Clear sticky fault: Static brake was momentarily disabled due to excessive braking current while disabled. | |
| virtual ctre::phoenix::StatusCode | ClearStickyFault_StaticBrakeDisabled ()=0 |
| Clear sticky fault: Static brake was momentarily disabled due to excessive braking current while disabled. | |
Detailed Description
Contains everything common between Talon motor controllers.
Constructor & Destructor Documentation
◆ ~CommonTalon()
|
virtualdefault |
Member Function Documentation
◆ SetControl() [1/46]
|
virtual |
Request coast neutral output of actuator.
The bridge is disabled and the rotor is allowed to coast.
- CoastOut Parameters:
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [2/46]
|
virtual |
Differential control with duty cycle average target and position difference target.
- Diff_DutyCycleOut_Position Parameters:
- AverageRequest: Average DutyCycleOut request of the mechanism.
- DifferentialRequest: Differential PositionDutyCycle request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [3/46]
|
virtual |
Differential control with duty cycle average target and velocity difference target.
- Diff_DutyCycleOut_Velocity Parameters:
- AverageRequest: Average DutyCycleOut request of the mechanism.
- DifferentialRequest: Differential VelocityDutyCycle request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [4/46]
|
virtual |
Differential control with Motion Magic® average target and position difference target using dutycycle control.
- Diff_MotionMagicDutyCycle_Position Parameters:
- AverageRequest: Average MotionMagicDutyCycle request of the mechanism.
- DifferentialRequest: Differential PositionDutyCycle request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [5/46]
|
virtual |
Differential control with Motion Magic® average target and velocity difference target using dutycycle control.
- Diff_MotionMagicDutyCycle_Velocity Parameters:
- AverageRequest: Average MotionMagicDutyCycle request of the mechanism.
- DifferentialRequest: Differential VelocityDutyCycle request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [6/46]
|
virtual |
Differential control with Motion Magic® average target and position difference target using voltage control.
- Diff_MotionMagicVoltage_Position Parameters:
- AverageRequest: Average MotionMagicVoltage request of the mechanism.
- DifferentialRequest: Differential PositionVoltage request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [7/46]
|
virtual |
Differential control with Motion Magic® average target and velocity difference target using voltage control.
- Diff_MotionMagicVoltage_Velocity Parameters:
- AverageRequest: Average MotionMagicVoltage request of the mechanism.
- DifferentialRequest: Differential VelocityVoltage request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [8/46]
|
virtual |
Differential control with position average target and position difference target using dutycycle control.
- Diff_PositionDutyCycle_Position Parameters:
- AverageRequest: Average PositionDutyCycle request of the mechanism.
- DifferentialRequest: Differential PositionDutyCycle request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [9/46]
|
virtual |
Differential control with position average target and velocity difference target using dutycycle control.
- Diff_PositionDutyCycle_Velocity Parameters:
- AverageRequest: Average PositionDutyCycle request of the mechanism.
- DifferentialRequest: Differential VelocityDutyCycle request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [10/46]
|
virtual |
Differential control with position average target and position difference target using voltage control.
- Diff_PositionVoltage_Position Parameters:
- AverageRequest: Average PositionVoltage request of the mechanism.
- DifferentialRequest: Differential PositionVoltage request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [11/46]
|
virtual |
Differential control with position average target and velocity difference target using voltage control.
- Diff_PositionVoltage_Velocity Parameters:
- AverageRequest: Average PositionVoltage request of the mechanism.
- DifferentialRequest: Differential VelocityVoltage request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [12/46]
|
virtual |
Differential control with velocity average target and position difference target using dutycycle control.
- Diff_VelocityDutyCycle_Position Parameters:
- AverageRequest: Average VelocityDutyCYcle request of the mechanism.
- DifferentialRequest: Differential PositionDutyCycle request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [13/46]
|
virtual |
Differential control with velocity average target and velocity difference target using dutycycle control.
- Diff_VelocityDutyCycle_Velocity Parameters:
- AverageRequest: Average VelocityDutyCycle request of the mechanism.
- DifferentialRequest: Differential VelocityDutyCycle request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [14/46]
|
virtual |
Differential control with velocity average target and position difference target using voltage control.
- Diff_VelocityVoltage_Position Parameters:
- AverageRequest: Average VelocityVoltage request of the mechanism.
- DifferentialRequest: Differential PositionVoltage request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [15/46]
|
virtual |
Differential control with velocity average target and velocity difference target using voltage control.
- Diff_VelocityVoltage_Velocity Parameters:
- AverageRequest: Average VelocityVoltage request of the mechanism.
- DifferentialRequest: Differential VelocityVoltage request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [16/46]
|
virtual |
Differential control with voltage average target and position difference target.
- Diff_VoltageOut_Position Parameters:
- AverageRequest: Average VoltageOut request of the mechanism.
- DifferentialRequest: Differential PositionVoltage request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [17/46]
|
virtual |
Differential control with voltage average target and velocity difference target.
- Diff_VoltageOut_Velocity Parameters:
- AverageRequest: Average VoltageOut request of the mechanism.
- DifferentialRequest: Differential VelocityVoltage request of the mechanism.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [18/46]
|
virtual |
Control device with generic control request object.
User must make sure the specified object is castable to a valid control request, otherwise this function will fail at run-time and return the NotSupported StatusCode
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, ctre::phoenix6::hardware::core::CoreTalonFXS, and ctre::phoenix6::hardware::traits::CommonTalonWithFOC.
◆ SetControl() [19/46]
|
virtual |
Request a specified motor duty cycle with a differential position closed-loop.
This control mode will output a proportion of the supplied voltage which is supplied by the user. It will also set the motor's differential position setpoint to the specified position.
- DifferentialDutyCycle Parameters:
- TargetOutput: Proportion of supply voltage to apply in fractional units between -1 and +1
- DifferentialPosition: Differential position to drive towards in rotations
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- DifferentialSlot: Select which gains are applied to the differential controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [20/46]
|
virtual |
Follow the differential motor output of another Talon.
If Talon is in torque control, the torque is copied - which will increase the total torque applied. If Talon is in percent supply output control, the duty cycle is matched. Motor direction either matches master's configured direction or opposes it based on OpposeMasterDirection.
- DifferentialFollower Parameters:
- MasterID: Device ID of the differential master to follow.
- OpposeMasterDirection: Set to false for motor invert to match the master's configured Invert - which is typical when master and follower are mechanically linked and spin in the same direction. Set to true for motor invert to oppose the master's configured Invert - this is typical where the the master and follower mechanically spin in opposite directions.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [21/46]
|
virtual |
Requests Motion Magic® to target a final position using a motion profile, and PID to a differential position setpoint.
Motion Magic® produces a motion profile in real-time while attempting to honor the Cruise Velocity, Acceleration, and (optional) Jerk specified via the Motion Magic® configuration values. This control mode does not use the Expo_kV or Expo_kA configs.
Target position can be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is duty cycle based, so relevant closed-loop gains will use fractional duty cycle for the numerator: +1.0 represents full forward output.
- DifferentialMotionMagicDutyCycle Parameters:
- TargetPosition: Average position to drive toward in rotations.
- DifferentialPosition: Differential position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- TargetSlot: Select which gains are applied to the primary controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- DifferentialSlot: Select which gains are applied to the differential controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [22/46]
|
virtual |
Requests Motion Magic® to target a final position using a motion profile, and PID to a differential position setpoint.
Motion Magic® produces a motion profile in real-time while attempting to honor the Cruise Velocity, Acceleration, and (optional) Jerk specified via the Motion Magic® configuration values. This control mode does not use the Expo_kV or Expo_kA configs.
Target position can be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is voltage-based, so relevant closed-loop gains will use Volts for the numerator.
- DifferentialMotionMagicVoltage Parameters:
- TargetPosition: Average position to drive toward in rotations.
- DifferentialPosition: Differential position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- TargetSlot: Select which gains are applied to the primary controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- DifferentialSlot: Select which gains are applied to the differential controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [23/46]
|
virtual |
Request PID to target position with a differential position setpoint.
This control mode will set the motor's position setpoint to the position specified by the user. It will also set the motor's differential position setpoint to the specified position.
- DifferentialPositionDutyCycle Parameters:
- TargetPosition: Average position to drive toward in rotations.
- DifferentialPosition: Differential position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- TargetSlot: Select which gains are applied to the primary controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- DifferentialSlot: Select which gains are applied to the differential controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [24/46]
|
virtual |
Request PID to target position with a differential position setpoint.
This control mode will set the motor's position setpoint to the position specified by the user. It will also set the motor's differential position setpoint to the specified position.
- DifferentialPositionVoltage Parameters:
- TargetPosition: Average position to drive toward in rotations.
- DifferentialPosition: Differential position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- TargetSlot: Select which gains are applied to the primary controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- DifferentialSlot: Select which gains are applied to the differential controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [25/46]
|
virtual |
Follow the differential motor output of another Talon while ignoring the master's invert setting.
If Talon is in torque control, the torque is copied - which will increase the total torque applied. If Talon is in percent supply output control, the duty cycle is matched. Motor direction is strictly determined by the configured invert and not the master. If you want motor direction to match or oppose the master, use FollowerRequest instead.
- DifferentialStrictFollower Parameters:
- MasterID: Device ID of the differential master to follow.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [26/46]
|
virtual |
Request PID to target velocity with a differential position setpoint.
This control mode will set the motor's velocity setpoint to the velocity specified by the user. It will also set the motor's differential position setpoint to the specified position.
- DifferentialVelocityDutyCycle Parameters:
- TargetVelocity: Average velocity to drive toward in rotations per second.
- DifferentialPosition: Differential position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- TargetSlot: Select which gains are applied to the primary controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- DifferentialSlot: Select which gains are applied to the differential controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [27/46]
|
virtual |
Request PID to target velocity with a differential position setpoint.
This control mode will set the motor's velocity setpoint to the velocity specified by the user. It will also set the motor's differential position setpoint to the specified position.
- DifferentialVelocityVoltage Parameters:
- TargetVelocity: Average velocity to drive toward in rotations per second.
- DifferentialPosition: Differential position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- TargetSlot: Select which gains are applied to the primary controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- DifferentialSlot: Select which gains are applied to the differential controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [28/46]
|
virtual |
Request a specified voltage with a differential position closed-loop.
This control mode will attempt to apply the specified voltage to the motor. If the supply voltage is below the requested voltage, the motor controller will output the supply voltage. It will also set the motor's differential position setpoint to the specified position.
- DifferentialVoltage Parameters:
- TargetOutput: Voltage to attempt to drive at
- DifferentialPosition: Differential position to drive towards in rotations
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- DifferentialSlot: Select which gains are applied to the differential controller by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [29/46]
|
virtual |
Request a specified motor duty cycle.
This control mode will output a proportion of the supplied voltage which is supplied by the user.
- DutyCycleOut Parameters:
- Output: Proportion of supply voltage to apply in fractional units between -1 and +1
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [30/46]
|
virtual |
Requests Motion Magic® to target a final position using a motion profile.
This dynamic request allows runtime changes to Cruise Velocity, Acceleration, and Jerk. Users can optionally provide a duty cycle feedforward. This control requires use of a CANivore.
Motion Magic® produces a motion profile in real-time while attempting to honor the specified Cruise Velocity, Acceleration, and (optional) Jerk. This control mode does not use the Expo_kV or Expo_kA configs.
Target position can be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is duty cycle based, so relevant closed-loop gains will use fractional duty cycle for the numerator: +1.0 represents full forward output.
- DynamicMotionMagicDutyCycle Parameters:
- Position: Position to drive toward in rotations.
- Velocity: Cruise velocity for profiling. The signage does not matter as the device will use the absolute value for profile generation.
- Acceleration: Acceleration for profiling. The signage does not matter as the device will use the absolute value for profile generation
Jerk: Jerk for profiling. The signage does not matter as the device will use the absolute value for profile generation.
Jerk is optional; if this is set to zero, then Motion Magic® will not apply a Jerk limit.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in fractional units between -1 and +1.
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [31/46]
|
virtual |
Requests Motion Magic® to target a final position using a motion profile.
This dynamic request allows runtime changes to Cruise Velocity, Acceleration, and Jerk. Users can optionally provide a voltage feedforward. This control requires use of a CANivore.
Motion Magic® produces a motion profile in real-time while attempting to honor the specified Cruise Velocity, Acceleration, and (optional) Jerk. This control mode does not use the Expo_kV or Expo_kA configs.
Target position can be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is voltage-based, so relevant closed-loop gains will use Volts for the numerator.
- DynamicMotionMagicVoltage Parameters:
- Position: Position to drive toward in rotations.
- Velocity: Cruise velocity for profiling. The signage does not matter as the device will use the absolute value for profile generation.
- Acceleration: Acceleration for profiling. The signage does not matter as the device will use the absolute value for profile generation.
Jerk: Jerk for profiling. The signage does not matter as the device will use the absolute value for profile generation.
Jerk is optional; if this is set to zero, then Motion Magic® will not apply a Jerk limit.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in volts
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [32/46]
|
virtual |
Follow the motor output of another Talon.
If Talon is in torque control, the torque is copied - which will increase the total torque applied. If Talon is in percent supply output control, the duty cycle is matched. Motor direction either matches master's configured direction or opposes it based on OpposeMasterDirection.
- Follower Parameters:
- MasterID: Device ID of the master to follow.
- OpposeMasterDirection: Set to false for motor invert to match the master's configured Invert - which is typical when master and follower are mechanically linked and spin in the same direction. Set to true for motor invert to oppose the master's configured Invert - this is typical where the the master and follower mechanically spin in opposite directions.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [33/46]
|
virtual |
Requests Motion Magic® to target a final position using a motion profile.
Users can optionally provide a duty cycle feedforward.
Motion Magic® produces a motion profile in real-time while attempting to honor the Cruise Velocity, Acceleration, and (optional) Jerk specified via the Motion Magic® configuration values. This control mode does not use the Expo_kV or Expo_kA configs.
Target position can be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is duty cycle based, so relevant closed-loop gains will use fractional duty cycle for the numerator: +1.0 represents full forward output.
- MotionMagicDutyCycle Parameters:
- Position: Position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in fractional units between -1 and +1.
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [34/46]
|
virtual |
Requests Motion Magic® to target a final position using an exponential motion profile.
Users can optionally provide a duty cycle feedforward.
Motion Magic® Expo produces a motion profile in real-time while attempting to honor the Cruise Velocity (optional) and the mechanism kV and kA, specified via the Motion Magic® configuration values. Note that unlike the slot gains, the Expo_kV and Expo_kA configs are always in output units of Volts.
Setting Cruise Velocity to 0 will allow the profile to run to the max possible velocity based on Expo_kV. This control mode does not use the Acceleration or Jerk configs.
Target position can be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is duty cycle based, so relevant closed-loop gains will use fractional duty cycle for the numerator: +1.0 represents full forward output.
- MotionMagicExpoDutyCycle Parameters:
- Position: Position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in fractional units between -1 and +1.
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [35/46]
|
virtual |
Requests Motion Magic® to target a final position using an exponential motion profile.
Users can optionally provide a voltage feedforward.
Motion Magic® Expo produces a motion profile in real-time while attempting to honor the Cruise Velocity (optional) and the mechanism kV and kA, specified via the Motion Magic® configuration values. Note that unlike the slot gains, the Expo_kV and Expo_kA configs are always in output units of Volts.
Setting Cruise Velocity to 0 will allow the profile to run to the max possible velocity based on Expo_kV. This control mode does not use the Acceleration or Jerk configs.
Target position can be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is voltage-based, so relevant closed-loop gains will use Volts for the numerator.
- MotionMagicExpoVoltage Parameters:
- Position: Position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in volts
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [36/46]
|
virtual |
Requests Motion Magic® to target a final velocity using a motion profile.
This allows smooth transitions between velocity set points. Users can optionally provide a duty cycle feedforward.
Motion Magic® Velocity produces a motion profile in real-time while attempting to honor the specified Acceleration and (optional) Jerk. This control mode does not use the CruiseVelocity, Expo_kV, or Expo_kA configs.
If the specified acceleration is zero, the Acceleration under Motion Magic® configuration parameter is used instead. This allows for runtime adjustment of acceleration for advanced users. Jerk is also specified in the Motion Magic® persistent configuration values. If Jerk is set to zero, Motion Magic® will produce a trapezoidal acceleration profile.
Target velocity can also be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is duty cycle based, so relevant closed-loop gains will use fractional duty cycle for the numerator: +1.0 represents full forward output.
- MotionMagicVelocityDutyCycle Parameters:
- Velocity: Target velocity to drive toward in rotations per second. This can be changed on-the fly.
- Acceleration: This is the absolute Acceleration to use generating the profile. If this parameter is zero, the Acceleration persistent configuration parameter is used instead. Acceleration is in rotations per second squared. If nonzero, the signage does not matter as the absolute value is used.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in fractional units between -1 and +1.
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [37/46]
|
virtual |
Requests Motion Magic® to target a final velocity using a motion profile.
This allows smooth transitions between velocity set points. Users can optionally provide a voltage feedforward.
Motion Magic® Velocity produces a motion profile in real-time while attempting to honor the specified Acceleration and (optional) Jerk. This control mode does not use the CruiseVelocity, Expo_kV, or Expo_kA configs.
If the specified acceleration is zero, the Acceleration under Motion Magic® configuration parameter is used instead. This allows for runtime adjustment of acceleration for advanced users. Jerk is also specified in the Motion Magic® persistent configuration values. If Jerk is set to zero, Motion Magic® will produce a trapezoidal acceleration profile.
Target velocity can also be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is voltage-based, so relevant closed-loop gains will use Volts for the numerator.
- MotionMagicVelocityVoltage Parameters:
- Velocity: Target velocity to drive toward in rotations per second. This can be changed on-the fly.
- Acceleration: This is the absolute Acceleration to use generating the profile. If this parameter is zero, the Acceleration persistent configuration parameter is used instead. Acceleration is in rotations per second squared. If nonzero, the signage does not matter as the absolute value is used.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in volts
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [38/46]
|
virtual |
Requests Motion Magic® to target a final position using a motion profile.
Users can optionally provide a voltage feedforward.
Motion Magic® produces a motion profile in real-time while attempting to honor the Cruise Velocity, Acceleration, and (optional) Jerk specified via the Motion Magic® configuration values. This control mode does not use the Expo_kV or Expo_kA configs.
Target position can be changed on-the-fly and Motion Magic® will do its best to adjust the profile. This control mode is voltage-based, so relevant closed-loop gains will use Volts for the numerator.
- MotionMagicVoltage Parameters:
- Position: Position to drive toward in rotations.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in volts
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [39/46]
|
virtual |
Request neutral output of actuator.
The applied brake type is determined by the NeutralMode configuration.
- NeutralOut Parameters:
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [40/46]
|
virtual |
Request PID to target position with duty cycle feedforward.
This control mode will set the motor's position setpoint to the position specified by the user. In addition, it will apply an additional duty cycle as an arbitrary feedforward value.
- PositionDutyCycle Parameters:
- Position: Position to drive toward in rotations.
- Velocity: Velocity to drive toward in rotations per second. This is typically used for motion profiles generated by the robot program.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in fractional units between -1 and +1.
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [41/46]
|
virtual |
Request PID to target position with voltage feedforward.
This control mode will set the motor's position setpoint to the position specified by the user. In addition, it will apply an additional voltage as an arbitrary feedforward value.
- PositionVoltage Parameters:
- Position: Position to drive toward in rotations.
- Velocity: Velocity to drive toward in rotations per second. This is typically used for motion profiles generated by the robot program.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in volts
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [42/46]
|
virtual |
Applies full neutral-brake by shorting motor leads together.
- StaticBrake Parameters:
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [43/46]
|
virtual |
Follow the motor output of another Talon while ignoring the master's invert setting.
If Talon is in torque control, the torque is copied - which will increase the total torque applied. If Talon is in percent supply output control, the duty cycle is matched. Motor direction is strictly determined by the configured invert and not the master. If you want motor direction to match or oppose the master, use FollowerRequest instead.
- StrictFollower Parameters:
- MasterID: Device ID of the master to follow.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [44/46]
|
virtual |
Request PID to target velocity with duty cycle feedforward.
This control mode will set the motor's velocity setpoint to the velocity specified by the user. In addition, it will apply an additional voltage as an arbitrary feedforward value.
- VelocityDutyCycle Parameters:
- Velocity: Velocity to drive toward in rotations per second.
- Acceleration: Acceleration to drive toward in rotations per second squared. This is typically used for motion profiles generated by the robot program.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in fractional units between -1 and +1.
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [45/46]
|
virtual |
Request PID to target velocity with voltage feedforward.
This control mode will set the motor's velocity setpoint to the velocity specified by the user. In addition, it will apply an additional voltage as an arbitrary feedforward value.
- VelocityVoltage Parameters:
- Velocity: Velocity to drive toward in rotations per second.
- Acceleration: Acceleration to drive toward in rotations per second squared. This is typically used for motion profiles generated by the robot program.
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- FeedForward: Feedforward to apply in volts
- Slot: Select which gains are applied by selecting the slot. Use the configuration api to set the gain values for the selected slot before enabling this feature. Slot must be within [0,2].
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
◆ SetControl() [46/46]
|
virtual |
Request a specified voltage.
This control mode will attempt to apply the specified voltage to the motor. If the supply voltage is below the requested voltage, the motor controller will output the supply voltage.
- VoltageOut Parameters:
- Output: Voltage to attempt to drive at
EnableFOC: Set to true to use FOC commutation (requires Phoenix Pro), which increases peak power by ~15% on supported devices (see hardware::traits::SupportsFOC). Set to false to use trapezoidal commutation.
FOC improves motor performance by leveraging torque (current) control. However, this may be inconvenient for applications that require specifying duty cycle or voltage. CTR-Electronics has developed a hybrid method that combines the performances gains of FOC while still allowing applications to provide duty cycle or voltage demand. This not to be confused with simple sinusoidal control or phase voltage control which lacks the performance gains.
- OverrideBrakeDurNeutral: Set to true to static-brake the rotor when output is zero (or within deadband). Set to false to use the NeutralMode configuration setting (default). This flag exists to provide the fundamental behavior of this control when output is zero, which is to provide 0V to the motor.
- LimitForwardMotion: Set to true to force forward limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
- LimitReverseMotion: Set to true to force reverse limiting. This allows users to use other limit switch sensors connected to robot controller. This also allows use of active sensors that require external power.
IgnoreHardwareLimits: Set to true to ignore hardware limit switches and the LimitForwardMotion and LimitReverseMotion parameters, instead allowing motion.
This can be useful on mechanisms such as an intake/feeder, where a limit switch stops motion while intaking but should be ignored when feeding to a shooter.
The hardware limit faults and Forward/ReverseLimit signals will still report the values of the limit switches regardless of this parameter.
UseTimesync: Set to true to delay applying this control request until a timesync boundary (requires Phoenix Pro and CANivore). This eliminates the impact of nondeterministic network delays in exchange for a larger but deterministic control latency.
This requires setting the ControlTimesyncFreqHz config in MotorOutputConfigs. Additionally, when this is enabled, the UpdateFreqHz of this request should be set to 0 Hz.
- Parameters
-
request Control object to request of the device
- Returns
- Status Code of the request, 0 is OK
Implements ctre::phoenix6::hardware::traits::HasTalonControls.
Reimplemented in ctre::phoenix6::hardware::core::CoreTalonFX, and ctre::phoenix6::hardware::core::CoreTalonFXS.
The documentation for this class was generated from the following file:
- ctre/phoenix6/hardware/traits/CommonTalon.hpp